
Commande adaptative avancée pour les mini véhicules sous-marins dans le contexte de l’inspection de structures:
Contacts : V. Creuze, A. Chemori, F. Comby, équipes EXPLORE, DEXTER et ICAR du LIRMM.
- Projet franco-mexicain PCP Conacit (UMI LAFMIA Mexico – Tecnalia France – LIRMM), Suivi automatique de structures sous-marines
- Contrat de collaboration de recherche Tecnalia – LIRMM, Commande adaptative d’un mini-ROV et Robotique sous-marine d’inspection
- Projet régional ARPE, Mini véhicule sous-marin pour l’observation de parois
Notre objectif est le développement de solutions robotisées pour l’inspection de structures immergées (coques, digues, pipelines…). Pour cela, on utilise traditionnellement des ROV (Remotely Operated Vehicle) de taille importante, emportant des capteurs élaborés. Cela représente un coût d’investissement élevé et des coûts opérationnels non négligeables. Ces gros véhicules présentent l’avantage d’une assez grande stabilité, ce qui facilite leur pilotage et augmente la qualité de l’observation, et permettent d’accéder à des zones inaccessibles à l’homme. Cependant leur taille interdit parfois leur utilisation dans des zones exigües et leurs coûts peuvent être pénalisants.
Très récemment, on a assisté à l’émergence de plusieurs modèles de très petits ROV, de faible coût et extrêmement maniables. L’émergence de ces très petits ROV s’accompagne de problèmes scientifiques nouveaux qui nécessitent la mise au point de nouvelles lois de commandes (c’est-à-dire de pilotage automatique). La petite taille engendre également des contraintes fortes sur les capteurs embarqués, voire nécessite la création de nouveaux types de capteurs. C’est sur ces deux thèmes (commande et perception) que se concentre notre travail de recherche.
Un autre aspect de cet axe est la commande robuste de robots sous-marins en présence d’incertitudes sur les paramètres (flottabilité, trainée…) et de perturbations externes (impacts, traction de l’ombilical…) (contrat industriel Tecnalia). Nous avons proposé et implanté sur l’AC-ROV une version étendue de la commande adaptative non linéaire en norme L1, en collaboration avec A. Chemori (équipe DEXTER). Contrairement aux commandes adaptatives traditionnelles, cette commande permet une adaptation très rapide des paramètres inconnus/variables du système, sans requérir la moindre connaissance a priori de leur valeur (initialisation à 0). La commande L1 proposée rejette également les perturbations externes telles que les à-coup infligés au ROV par l’ombilical ou les chocs mécaniques et permet d’atteindre une précision en profondeur de 3 cm, dans des conditions où la plupart des ROV n’atteignent que 10 cm. Ces travaux sont complétés, en collaboration avec F. Comby (équipe ICAR), par le développement de méthodes optiques robustes et rapides pour le suivi de pipelines dans le cadre d’un projet PCP Conacyt avec l’Unité Mixte Internationale LAFMIA (CNRS/CINVESTAV, Mexico). Parallèlement, nous étudions le suivi de mur ou de coque dans le cadre d’une collaboration industrielle (Tecnalia) et d’un projet régional ARPE. Les méthodes développées mettent en œuvre la vision monoculaire ou la vision stéréoscopique couleur associée à une centrale inertielle. Des hypothèse sur la nature de la structure suivie permettent d’accomplir une détection robuste aux mouvements des algues (décorrélés des mouvements du véhicule), aux particules en suspension et aux reflets, tout en minimisant le temps de calcul.
| Commande adaptative non linéaire en norme L1 | |
|---|---|
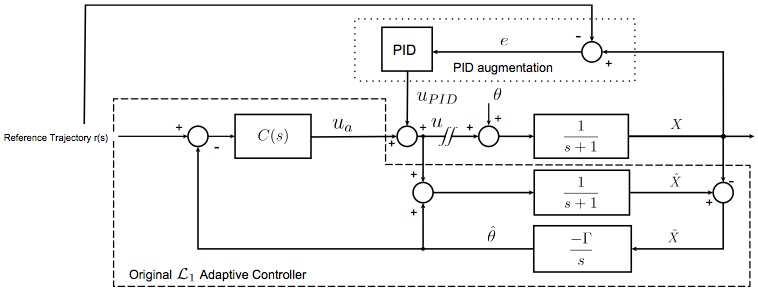 Block diagram of the L1 adaptive controller |
 AC-ROV with the reference frames
|