
Exploration des réseaux karstiques
Flagship project of the NUMEV Labex: AleyinAutonomous Systems for Karst Exploration2016-2020 |  |
L’exploration de réseaux karstiques est un enjeu majeur pour la gestion de la ressource en eau potable dans notre région, comme au niveau mondiale. Le projet KARST est transdisciplinaire qui, en plus de la robotique, associe des mathématiciens, des hydrogéologues, des micro-électroniciens.. Il a été soutenue et labellisé par le Labex NUMEV, et à abouti au lancement du projet NUMEV étendard Aleyin.
- Laboratoires impliqués dans Aleyin : LIRMM, Hydrosciences (HSM), IES, IMAG.
- Coordinateur du projet : Lionel Lapierre
L’un des principaux objectifs de ce projet est de réaliser la modélisation spatiale d’un réseau karstique à l’aide d’un engin robotisé sous marin. Cet engin portera les capteurs nécessaires à la caractérisation géométrique de l’aquifère visité, à savoir une ceinture de proximètres montée dans le plan frontal et permettant l’acquisition d’un plan de coupe du réseau, la suite classique de capteurs odométriques (accéléromètres, inclinomètres, compas) qui, associée à une référence acoustique fixe (pinger), permettra de reconstruire la trajectoire de l’engin et par la suite, le modèle 3D du réseau de drainage l’aquifère karstique. De plus, l’engin sera doté d’une caméra omnidirectionnelle permettant d’acquérir une image sur 360°. La fusion multi-modale du modèle 3D et de la texture acquise sera faite hors ligne. L’engin sera dans un premier temps téléopéré, le but premier étant de réaliser un vecteur d’exploration environnementale porteur de capteurs mission dédiés à l’application, modélisation d’un réseau karstique dans le cas présent. Cette première étape s’inscrit dans un cadre scientifique ambitieux qui, projeté sur un horizon de 8 à 10 ans, permettra de créer un réseau de capteurs environnementaux à déploiement et mobilité contrôlés.
Expérimentations :
- Tests de centrage dans le canal du midi (Béziers) : début 2016
- 1er test dans un Karst : le gouffre de Gourneyras : juillet 2016
- Test de reconstruction du Durzon : juillet 2018

Robotique pour l’observation de la biodiversité sous marine
I-Site MUSE project BUBOTBetter Understanding Biodiversity changes thanks to new Observation Tools2019-2022 |
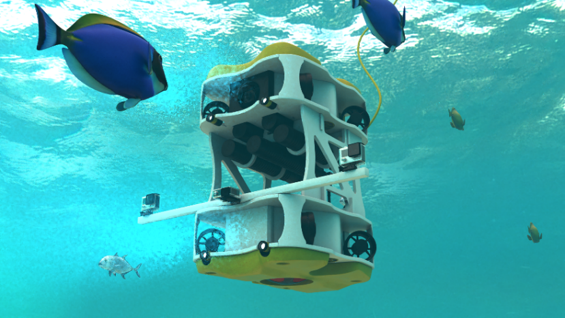
L’équipe EXPLORE s’intéresse à la problématique de la robotique sous-marine appliquée à l’observation de la biologie marine. Le robot devient un outil au service des biologistes marins, pour par exemple caractériser l’habitat et quantifier la biodiversité des océans. Commandé en télé-opération, en semi-autonomie à termes de façon autonome, le robot devra être conçu conceptuellement pour répondre aux besoins très particuliers à ce contexte : conception matérielle, commande et gestion de missions spécifiques (suivi de tortue, observation de patate de corail..), tolérance aux fautes nécessaire de part la criticité des missions et la complexité de l’environnement..
Cet axe a été initié avec les partenaires suivants :
- Unités MUSE impliquées dans BUBOT : LIRMM, MARBEC, EspaceDev.
- Coordinateur du projet : Karen Godary-Dejean, LIRMM
- Partenaires extérieurs à MUSE : CUFR de Mayotte, UC. Davis (USA), Univ. Lùrio (Mozambique)
Le lancement de ce projet a été précédé par une collaboration entre le LIRMM, MARBEC et le CUFR basé sur la thèse de Silvain Louis, Système robotisé semi-autonome pour l’observation des espèces marines, Co-encadrée par Lionel Lapierre et Karen Godary-Dejean du LIRMM, Thomas Claverie (MARBEC et CUFR) et Sebastien Villeger (MARBEC). Cette thèse a été co-financée par l’école doctorale I2S et le CUFR de Mayotte.
Robotique pour l’archéologie sous-marine
Anciens projets
- contrat PICS (Projets internationaux de coopération scientifique) ARCHEO
- Collaboration méditerranéenne sur archéo sous marine (CNR-Italie + DSOR-Portugal)
- Soutien à l’exploration archéologique du lac TITICACA,
Projet Huiñaimarca des fouilles du lac Titicaca en Bolivie
- site du projet Huiñaimarca
- Ce projet est porté par l’archéologue Christophe Delaere (Université Libre de Bruxelles)
- Collaborations scientifiques avec le LIRMM initiée en 2012 :
- 2012 : relevé topographique d’une zone du lac mineur
- 2013 : assistance aux archéologues sous-marins dans leur prospection par le robot sous-marin Jack (LIRMM-CISCREA).
Communications :
- Magazine de l’UM2 : Un robot au service des archéologues UM2-Magazine-fevrier-2014-Numero8_Titicaca
- France3 : http://pluzz.francetv.fr/videos/grand_soir_3_,89678369.html (à voir entre la 14ème mn. et 16ème mn. sur la vidéo)
- RTBF : http://www.rtbf.be/info/societe/detail_une-equipe-de-l-ulb-decouvre-un-tresor-inca-dans-le-lac-titicaca?id=8109216 (et vidéos sur la page)