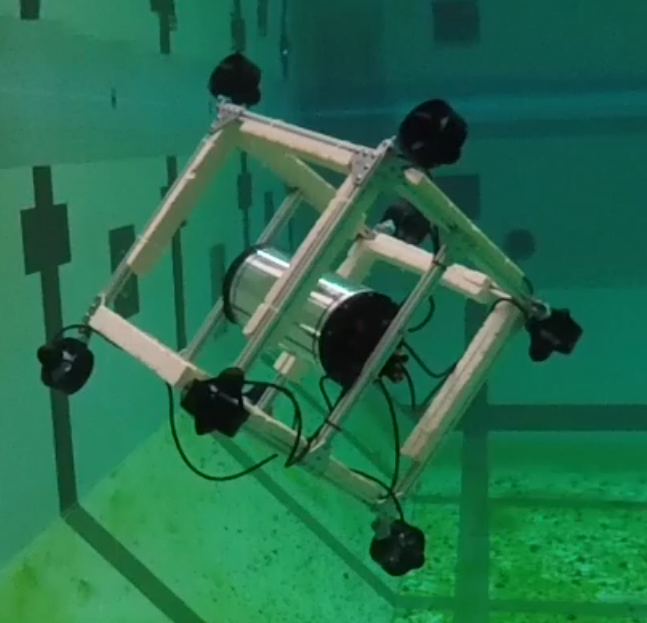
Underwater robots |
||
|---|---|---|
 | 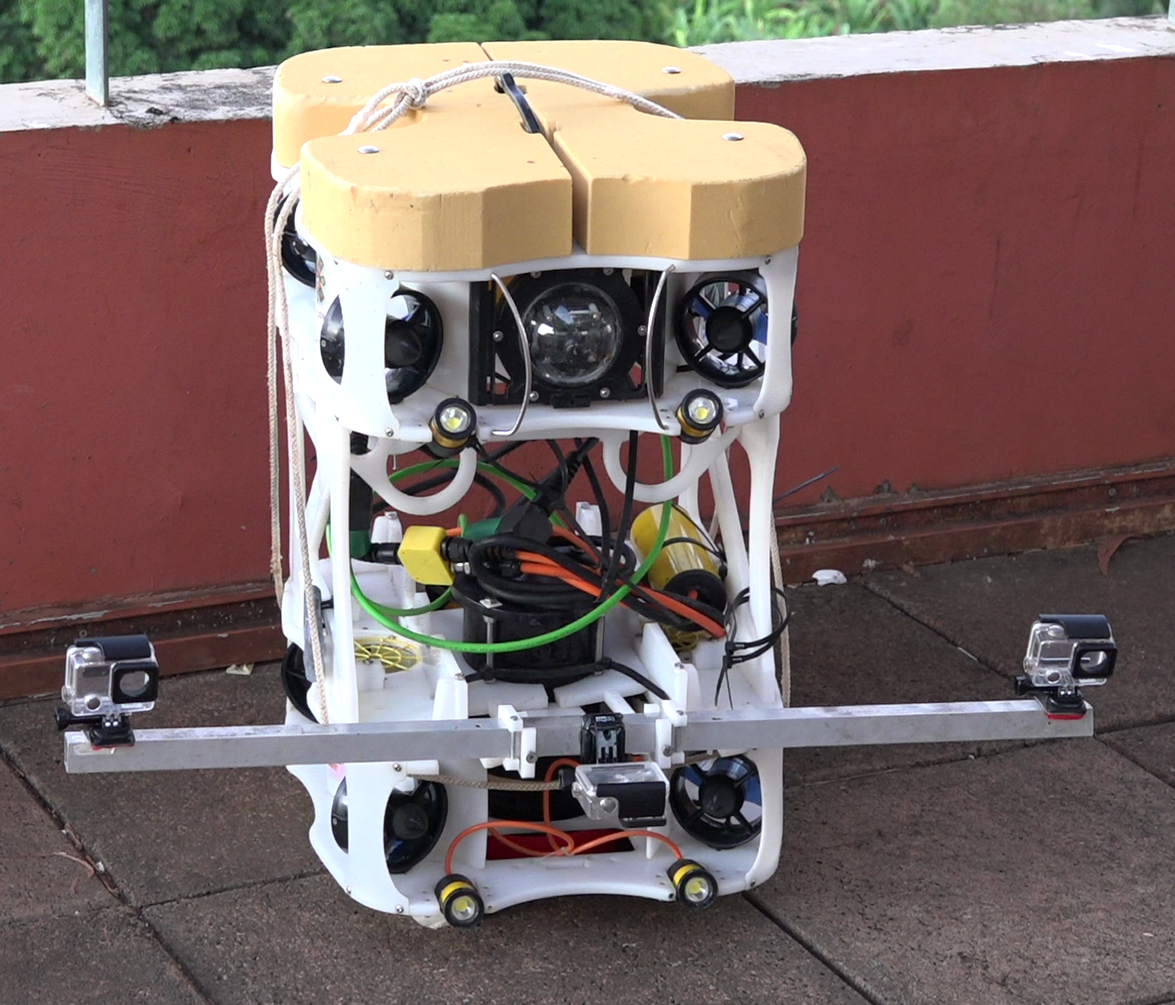 | |
| Mini-ROV JACK from Ciscrea, modified for our needs | Ulysse prototype, developped by the Explore team | |
 | 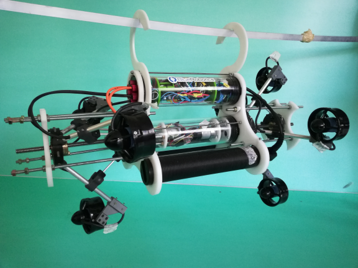 |  |
| The Cube | Sentinel | UWRS |
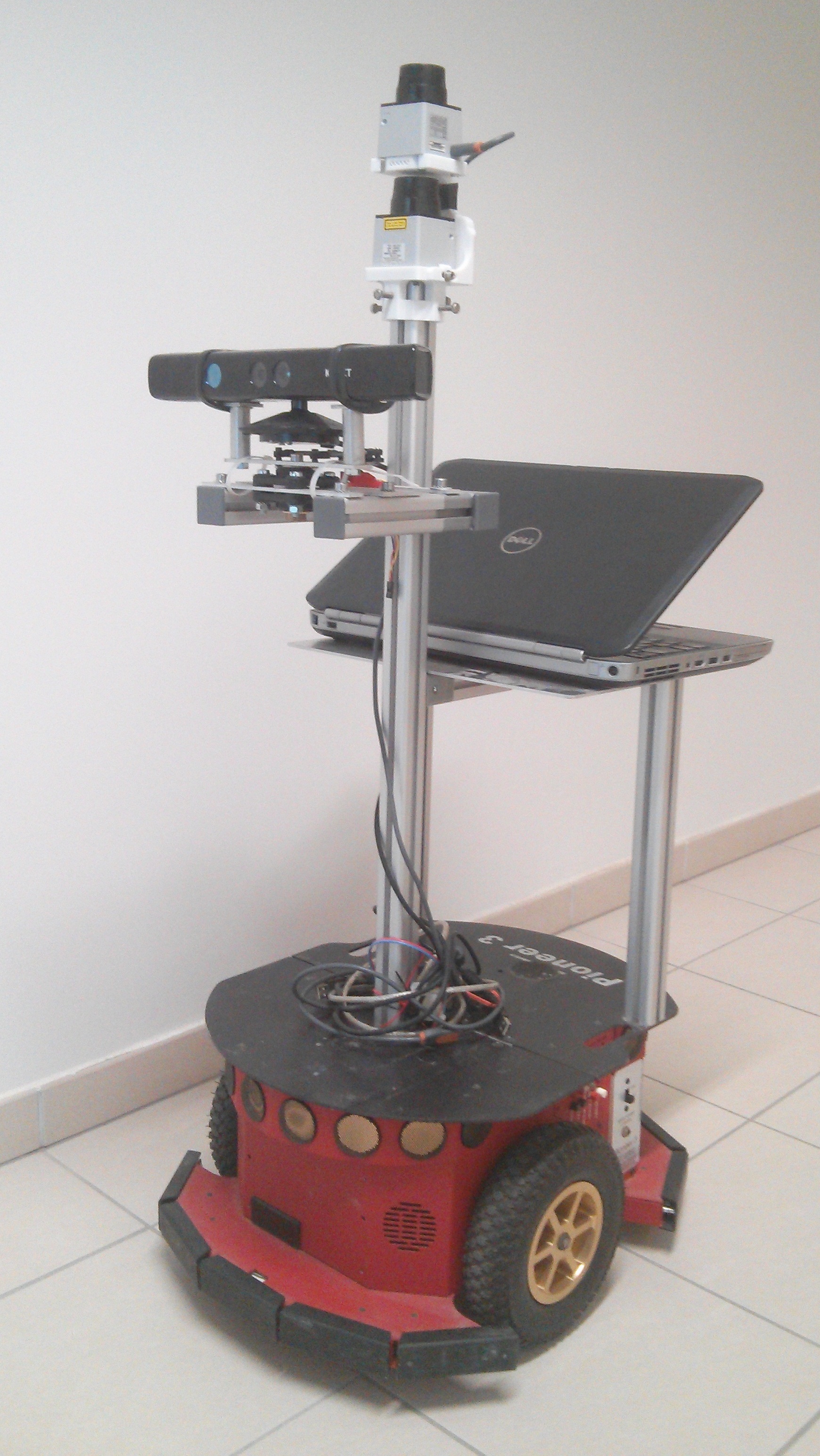
Terrestrial robots |
||
 |  |
|
| Pioneer P3-DX equipped for our missions | The hexapode R.Hex robot, designed by the Explore team | |
Software platforms |
||
 |  |
|
| The middleware Contract, used to design the control architecture of our robots | ||

Université Montpellier > LIRMM > Rob